
企業動態
為實現水果的自動分極卸料,水果自動分揀輸送機的分級卸料控制系統必須能夠實時檢測、連續跟蹤輸送線上水果流的動態位置,以水果到達相應等級的分級出口時,控制分級卸料執行機構對水果實施自動卸料。昱音技術利用接近開關和移位寄存器設計了一套控制系統,實現了料斗式水果分級卸料機構的分級卸料過程的自動控制。PLA等人則利用CAN總線網絡構建一套水果自動分揀輸送機柔性控制系統。為進一步提高分級卸料控制系統的可靠性、可擴展性和同步性能。
設計出一套水果自動分揀輸送機分級卸料過程實時控制系統,提出一種水果等級信息與水果實時位置間的連續動態配準方法,實現輸送線上水果流的動態位置的實時檢測、連續跟蹤、水果分級信息與實時位置的連續動態配準以及水果分級卸料過程的自動控制。給出控制系統的電路結構,分析步進電的控制過程,并且詳細論述水果等級信息與其實時位置間的動態配準方法。實際運行實驗表明,在該系統的控制下,所有水果都在品質檢測裝置為其判定的等級出口處自動平穩卸料。
1、水果自動分揀輸送機構的一般工作原理
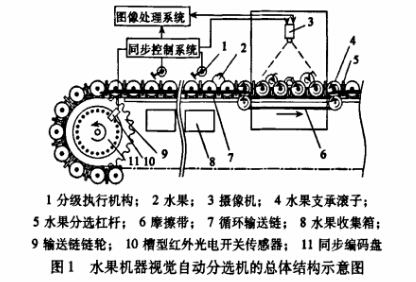
水果自動分揀輸送機一般由水果輸送裝置、水果品質檢測裝置、水果分級卸料裝置和同步控制系統等部分組成。在圖1所示的自主研發的水果機器視覺自動分揀輸送機中,滾子式水果輸送裝置負責連續輸送水果并且使得水果自動成單個排列;攝像機負責連續采集輸送上水果流的動態序列圖像,由圖像處理系統對圖像進行處理,提取各個水果到達所屬等級的分級出口時,相應的分級執行機構動作。迫使該水果下面的水果分選杠桿轉動,將水果從滾子上撬起來并滾人相應的水果收集箱;同步控制系統則負責控制分揀輸送機的各個部件同步協調工作。
2、杠桿式水果高速分級卸料裝置的工作原理
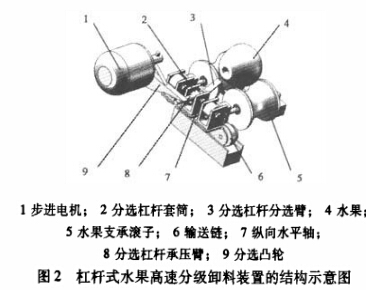
圖1中所采用的杠桿式水果高速分級卸料裝置的具體結構如圖2所示。分選杠桿通過其中間套筒安裝在縱向水平軸上,并且可以繞其自由轉動。在步進電機的驅動下,分選凸輪可以在其“分選”和“通過”兩個工作位置之間來回切換。在“分揀”位置,分揀凸輪的工作表面的最高點正好與分揀杠桿承壓臂的上表面齊平。當分選杠桿在輸送鏈的帶動下向前運動時,其承壓臂就在分選凸輪的工作表面上滑動,并且在分揀凸輪升程的作用下被迫繞縱向水平軸轉動,分揀杠桿的分選臂則逐漸將水果從支承滾子上撬起并逐漸滾離輸送線;在“通過”位置,分揀凸輪工作表面的最低點高于分選杠桿承壓臂的上表面。通過對分選凸輪工作表面形狀的優化設計,可保證卸料過程水果沒有沖擊。http://m.sz6868.cn/分揀輸送機技術整理發布。
