行業(yè)新聞

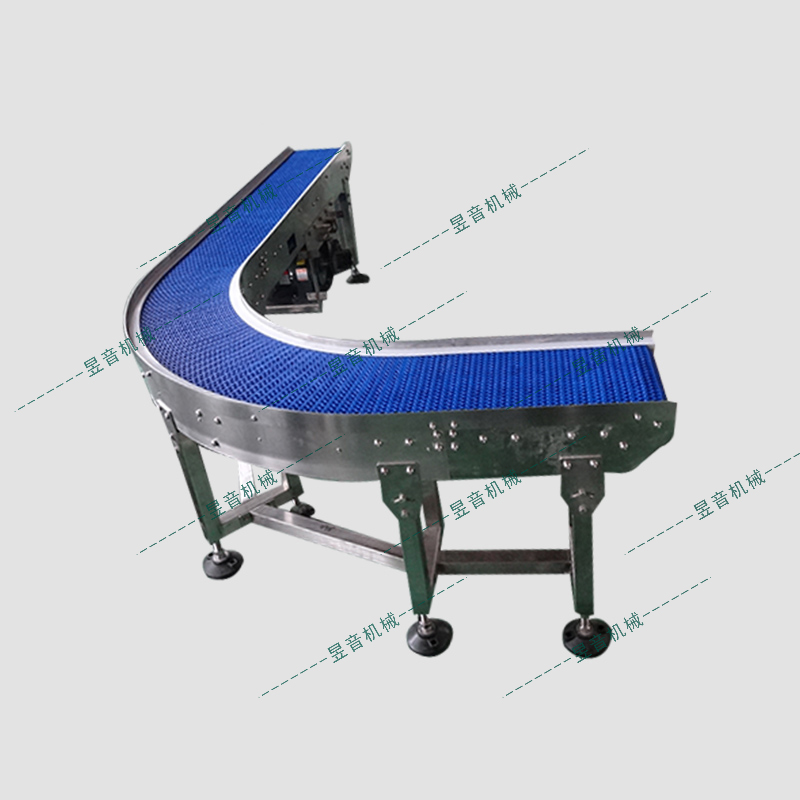
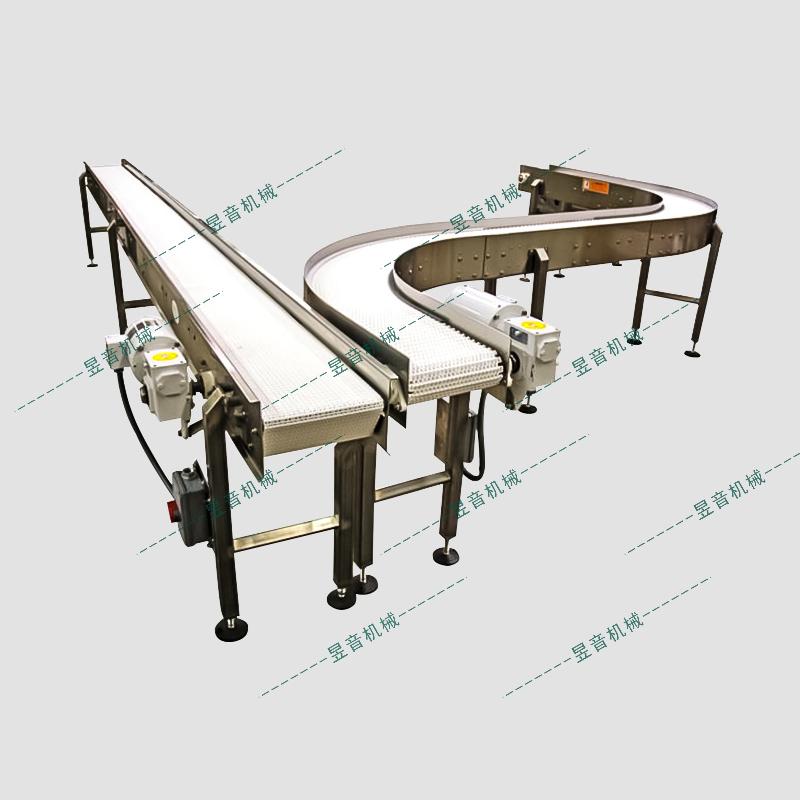
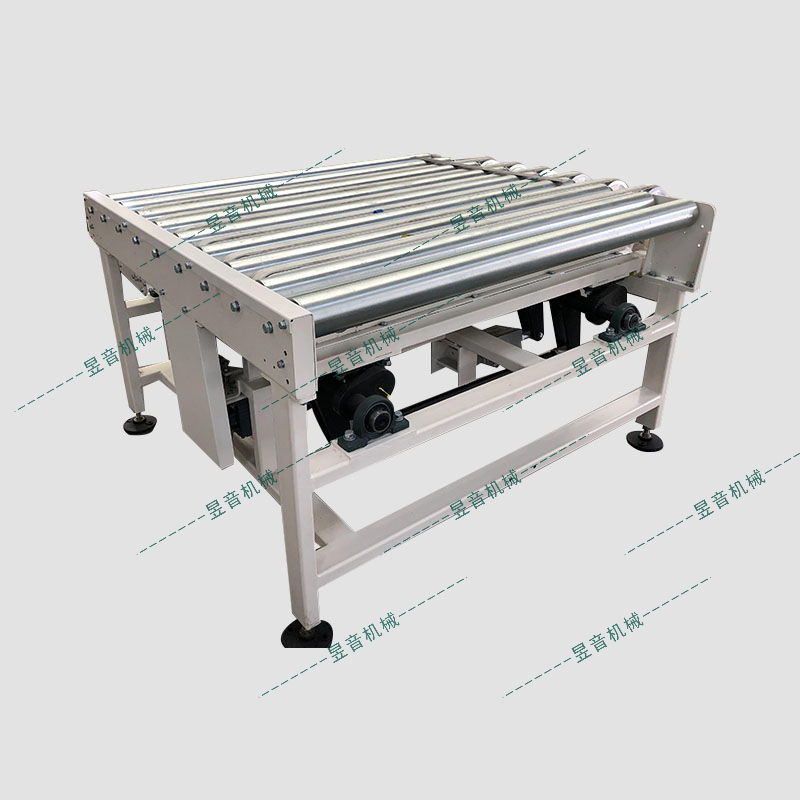
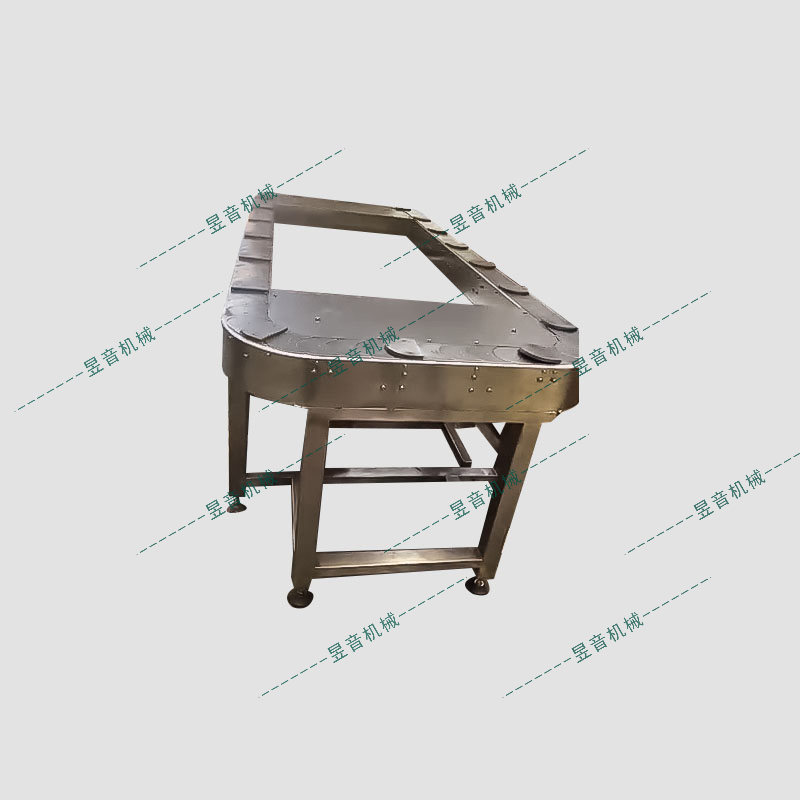
傳動滾筒輸送機主要是由機架、驅(qū)動部分、支架、傳動滾筒等部分進行構(gòu)成,有著過運送量大速度快、運轉(zhuǎn)輕快,可以進行實現(xiàn)多品種共線分流輸送的特點。傳動滾筒輸送機有著可靠性高、結(jié)構(gòu)簡單、使用維護方便的特點。傳動滾筒輸送機之間易于銜接過濾,可用多條傳動滾筒線及其他的輸送機或是專機進行組成復(fù)雜的物料輸送系統(tǒng)完成多方面的需要。
傳動滾筒輸送機的對動力源電動機的要求是運行穩(wěn)定、易于控制、轉(zhuǎn)速較低即可,因些選用步進電機作為驅(qū)動電機,步進電機帶動摩擦輪上的鋼絲繩,之后通過與巡檢艙的連接、驅(qū)動巡檢艙,最后一個導(dǎo)向輪實現(xiàn)一個閉環(huán)。巡檢艙在監(jiān)測過程中是由上位機的信號進行控制,并且需要實現(xiàn)較為精確的位置控制。具體為通往復(fù)的運動對傳動滾筒輸送機的每個托輥進行運行狀態(tài)的采集,在每個托輥位置停止運動并且能反饋位置信號。通過光電編碼器即可以測得巡檢艙的位置信息,考慮到鋼絲繩可能導(dǎo)致的打滑等問題,應(yīng)該設(shè)置接近開關(guān)在每次往返后進行誤差消除。

傳動滾筒輸送機選用了步進電機細(xì)分驅(qū)動器并且使用單片機對其進行控制。單片機選 用了AVR公司的ATmega16L單片機,使用其輸出脈沖對步進電機進行控制,ATmega16L的快速PWN模式可用來產(chǎn)生高頻的PWM波形。由于步進電機細(xì)分驅(qū)動器對脈沖寬度沒有要求,因此將快速PWM模式設(shè)定為方波輸出,在中斷程序中修改計數(shù)器的計數(shù)周期就可以實時改變方波輸出頻率。
傳動滾筒輸送機的巡檢裝置需要對傳動滾筒輸送機可能存在的打滑、跑偏、撕裂、斷帶、火災(zāi)等故障進行監(jiān)測并且進行判斷,其內(nèi)部應(yīng)該裝有振動、溫度、噪聲及煙霧等傳感器。考慮到運行時間長、重復(fù)監(jiān)測檢測次數(shù)多等特點,應(yīng)該要避免故障診數(shù)以千計及報警過程的過于復(fù)雜,故將數(shù)據(jù)處理過程以及報警過程安排在巡檢裝置的內(nèi)部進行。