企業動態
我國是一個果蔬生產大國,但是,我國果蔬市場長期以來一直屬于粗放型經濟,果蔬產品的國際市場價格偏低,其重要原因是我國果蔬采后處理落后,外觀質量偏低,因此,果蔬的分級已經和我國果蔬的市場況爭力緊密相聯。這里就需要分揀輸送機來進行對果蔬的分揀,可以按照其重量分級篩選,也是設備的核心部分。分揀輸送機的控制的設計,是利用輸送設備利用稱重式傳感器對果蔬進行動態測量,從而將果蔬按照重量的大小進行自動分類。
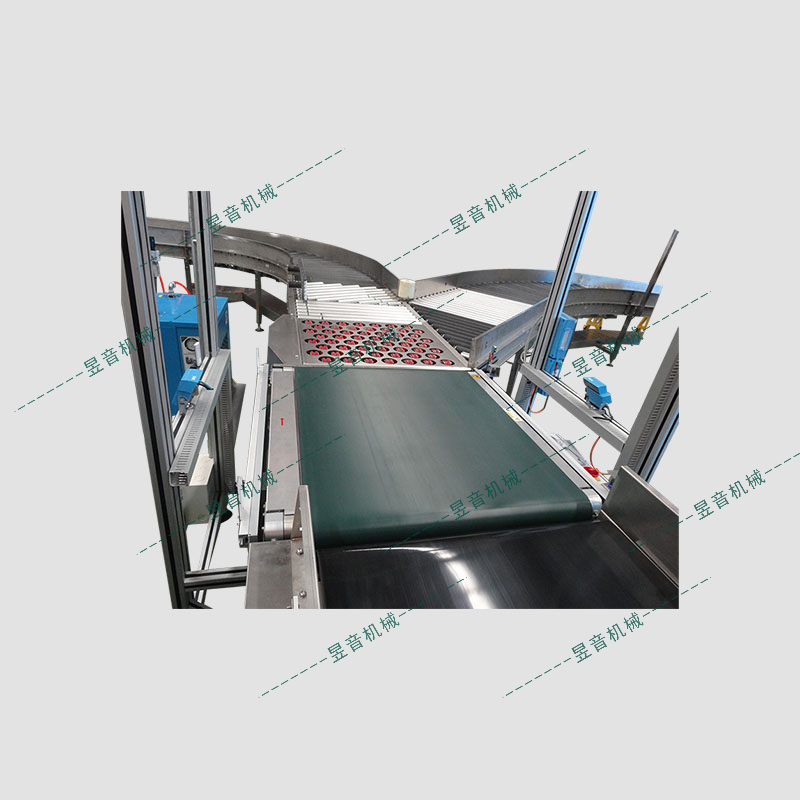
果蔬分揀輸送機輸送線路主要由上果段、分選傳感器段和分果出口段組成。上果段負責將已經清洗上蠟的果蔬平穩地置人果杯,由一根鉸鏈帶動向前運行至傳感段,這一段要求盡量使果蔬在進入傳感分選段之前果蔬保持運行的平穩,以減弱上果瞬間的機械振動。

分揀輸送機的傳感段部分是由兩根并行的整體鑄鋁導軌構成,果杯底部的四只對稱壓腳分別壓在兩根導軌表面由鉸鏈拉動向前滑動,導軌有一個長方形凹槽,槽內分別固定懸臂梁式壓力傳感器,傳感器上水平安置一塊長方形鋼板,長度所占長度相當,鋼板表面處理的極為光滑,鋼板與鑄鋁表面處同一平面,與鑄鋁保持一定縫隙,以避免鋼板在稱重的時候由于與周圍的鑄鋁接觸 產生數據誤差,鋼板與鑄鋁的縫隙不能過大,以避免果杯劃過該段時產生的震動,這個震動在傳感器的輸出信號上反映為幅度很大的振蕩電壓信號,它對果蔬的稱重量影響很大,鑄鋁導致面被加工成光潔度非常高的兩邊低中間高的拱形結構,當果杯被拖送到傳感段的時候,隨著果杯向前移多,鑄鋁斜坡越來越高,果杯的稱重壓腳被光滑的鑄鋁表面鋼板托起,果杯及果蔬的重力因此逐漸與鉸鏈膠離,當果杯滑動到重力傳感器的部分時,果杯高度達到最高點,短時間內果懷重力完全脫離鉸鏈,果杯的四只稱重壓腳全部壓在兩邊的兩只重力傳感器的鋼板上,傳感器利用果杯重力脫離鉸鏈快速過過傳感器的短暫時間迅速采集數據,經過CPU的計算,得到果杯與果杯上所置的果蔬的重量之和。
分揀輸送線傳感段之后緊接著是分果出口段,它是在傳送帶側面安排了若干個出果口和接果槽,每個口設計一個控制出果的電磁閥。當已經在傳感器段被沒出重量的果蔬通過相應的出果口時,CPU會及時發出控制命令,令該出果口的電磁閥動作,果蔬因此滾入接果槽,出果口越多,則果蔬口級的分選也將越細。http://m.sz6868.cn/分揀輸送機技術整理發布。