企業動態
在礦山皮帶輸送機系統中,其連鎖控制大都都采用“逆流啟動”的方式。即從料流的終端開始,逆流方向依次啟動每臺皮帶輸送機,首端皮帶輸送機最后啟動。如果參加連鎖皮帶輸送機數量較多,則系統的啟動時間有時長達幾十分鐘,此時設備空運轉,造成機械磨損和能源損耗。為了解決這個問題長期以來,人們一直探求“順流啟動”控制方式。即從料流的始端開始,根據料流情況,順料流方向,依次啟動每臺皮帶輸送機。但是,從皮帶輸送工藝的特點知,當“緊急停車”(如事故停車)后,由于皮帶上載滿物料,重新啟動時必須改為“逆流啟動”。這就是說一個“順流啟動”控制系統必須具備“順流啟動”和“逆流啟動”兩種控制程序,而且這兩種控制程度可根據需要隨時進行轉換,以滿足工藝的需求。由于皮帶輸送機絕大部分采用繼電器控制系統,其控制程序隨其硬件接線一次性施工而固化,從運行管理角度講,要想隨心所欲地改變控制程序是不可能的。但是,PLC具有“可編程序”的功能,使得“順流啟動”這一難題迎刃而解。
順流啟動的控制原理
皮帶輸送機系統的工藝流程如圖3所示。圖中的B1、B2、B3、B4........Bn分別表示皮帶輸送機的代號,箭頭表示料流方向。“順流啟動”的控制工藝流程如圖3所示。
1、先啟動B1,并且同時給料。當物料隨著皮帶運轉而到達距轉載點一定距離時,由程序啟動B2,如果B2因其他原因拒啟運轉能或啟動失敗,B1必須在物料到達轉載點之前停車。
2、系統處于正常運行中,如果其中一臺皮帶輸送機突然停機,逆料流方向,其上部皮帶輸送機應立即停車,其下部皮帶輸送機可繼續運行。
3、系統正常停機的程序是按料流方向依次延時停機,以保證停機后皮帶輸送機空載。
4、系統有載運行時突然停機后,再次啟動時,必須轉為“逆料流啟動”程序,以保證轉載點不發生“堵漏”。綜上所述,“順流啟動”控制方式的關健是相鄰皮帶之間的關系。現以圖3中的B2為例,詳細分析B1、B2和B3之間各個參數的相互聯系與制約關系。在正常情況下,系統開車前,所有皮帶都是停止的,首先啟動B1,并且開始下料。當物料從01到達N1時,命令B2啟動,當物料到達M1時,如果B2啟動不成功,B1應該立即停機。如果成功,則系統繼續運協以 。同理,當物料到達N2時,啟動B3,到達M2時,根據B3的啟動情況決定系統停機或運行。根據上述,為量化物料過程,有必要引入兩個定義。
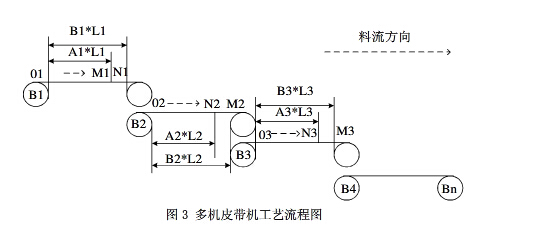
啟動信號:“順流啟動”的關健是“料來了才啟動”。因此,必須取一個代表“料流”的信號作為動信號。如圖3所示,B2的啟動信號(脈沖)是物料到達N1時發出的,為突出問題的實質,把這段時間(TQBZ)稱為B2的啟動信號。