企業動態
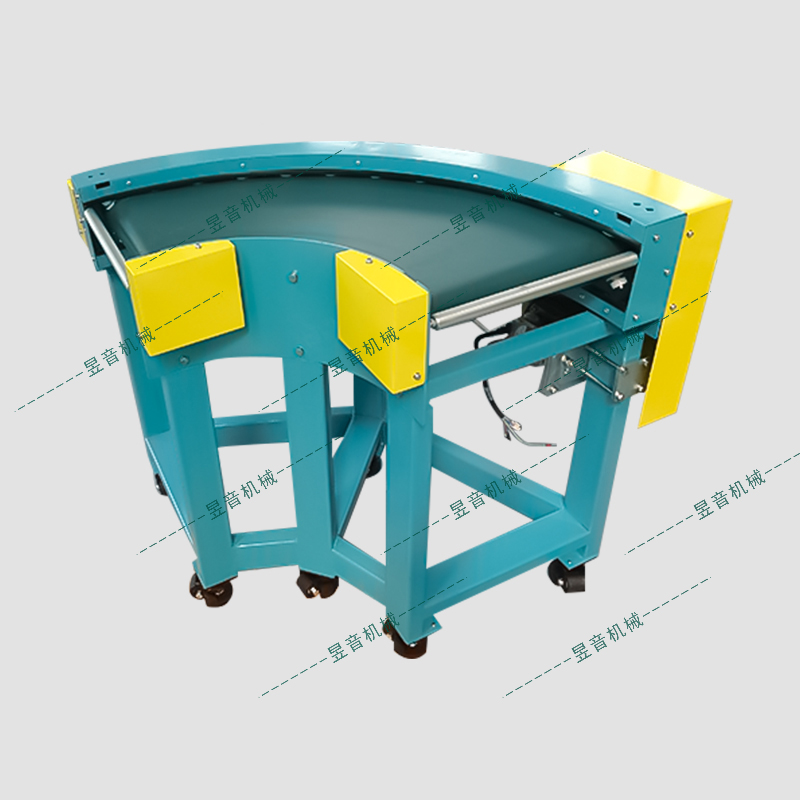
作為專業皮帶輸送機廠家昱音不僅要保障每一臺輸送設備的出廠質量,同時還要研發輸送設備的新功能及測試來滿足市場更為廣泛的多功能需求。下面我們就以皮帶輸送機系統的動力學為例;皮帶輸送機的動力系統的動力模型主要是由許多細小的橫截面為矩形的剛體輸送帶塊單元進行組合而成,假設輸送帶處于穩定的工作狀態,每個單元截面所受到的應力相等,單元體的變形情況和輸送帶整體的變形情況一致,則需要建立單個剛體輸送帶塊單元的動力學方程就可以得到整個皮帶輸送系統的動力學方程。
磁懸浮皮帶輸送機系統在經過簡化之后,整體結構就只有滾筒、支架和輸送帶三大構件,滾筒部分是將整個滾筒軸、輪轂及福板等整合為一個整體機構。支架只需要建支撐治療筒的支架即可,輸送帶部分的支架不需在其虛擬樣機模型中建立,在進行分析時只需要在相應位置施加由ANSYS所計算分析式截荷 即可。皮帶輸送機輸送帶的建模是復雜也是關健的,主要包括輸送帶的剛體建模和柔性化處理工作。皮帶輸送機滾筒所受的圓周力不大,實際滾筒內部的輪轂與福板采用鑄造結構、福板接盤與滾筒間采用螺栓連接,這樣可以規避博接給滾筒所帶來不利因素。

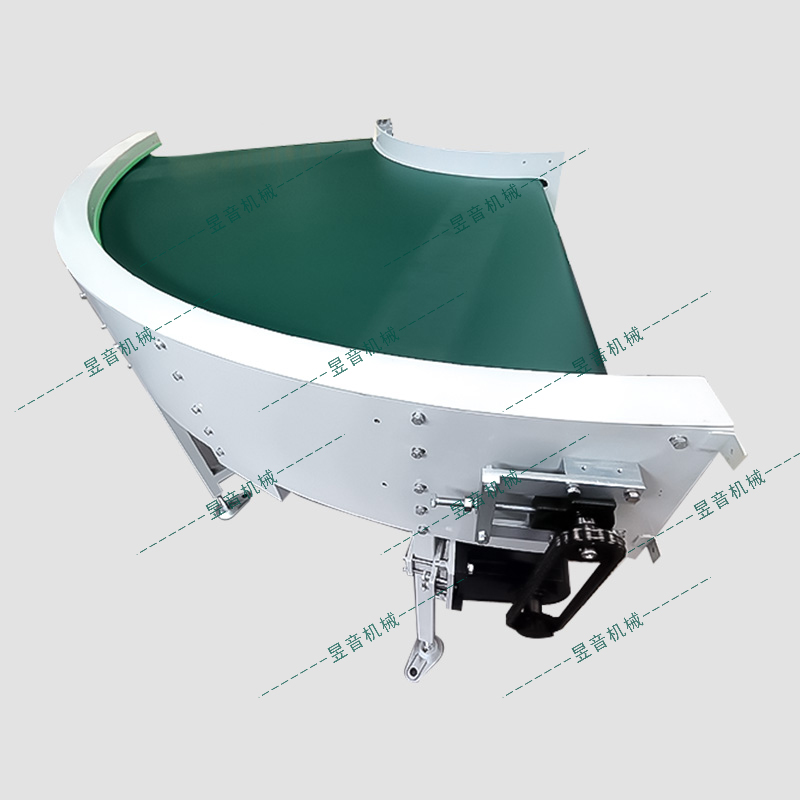
皮帶輸送機完成滾筒和輸送帶的建模后,需要將其裝配成皮帶輸送機的整體模型,并完成.運動約束和載荷的添加。根據輸送帶和滾筒的結構和接觸方式來建立皮帶輸送機的虛擬樣機模型需要注意以下幾點:(1)滾筒軸與地面的旋轉約束,主要是機架振動對輸送帶影響非常小,可以忽略不計,直接將其簡化成滾筒軸與地面的旋轉約束;(2)傳動滾筒自身動力旋轉約束的設定以及改向滾筒的自然旋轉約束,驅動滾筒的動力Motion參數需要通過建立啟動時間函數來定義,這樣才能模擬帶式皮帶輸送機起制動的作用力的情況;(3)輸送帶塊之間的柔性力的約束,主要通過Bushing力來連接;(4)輸送帶與滾筒的接觸方式的設定。ADAMS中約束的添加需要注意先后順序,先點擊的部件是相對后點擊部件運動的。皮帶輸送機虛擬樣機前期處理的最后一步就是載荷的添加和各部件的運動約束方程的定義。根據前一章所計算的輸送帶所受均布載荷,在ADMAS中通過模態力MForce對所建立的輸送帶相應柔性單元施加均布載荷,主要用于模擬物料的重力和永磁體對其的磁斥力。
皮帶輸送機下部的永磁懸浮裝置和輸送帶之間的斥力計算是非常復雜的。磁懸浮的磁路結構跟長方體的磁路在結構形式上有所不同,但其磁路的作用效果是一致的。皮帶輸送機的輸送帶在平整狀態下,磁極化方向是豎直的,這樣的磁路設計與長方體永磁豎直方向磁化后磁力的作用效果是相似的,可以將瓦形永磁體沿圓周方向看成是由有限個細小的長方體單元永磁塊組成,這樣瓦形永磁體磁場力的作用效果同長方體的永磁體間磁場力作用效果相似。http://m.sz6868.cn/皮帶輸送機技術整理發布。