企業動態
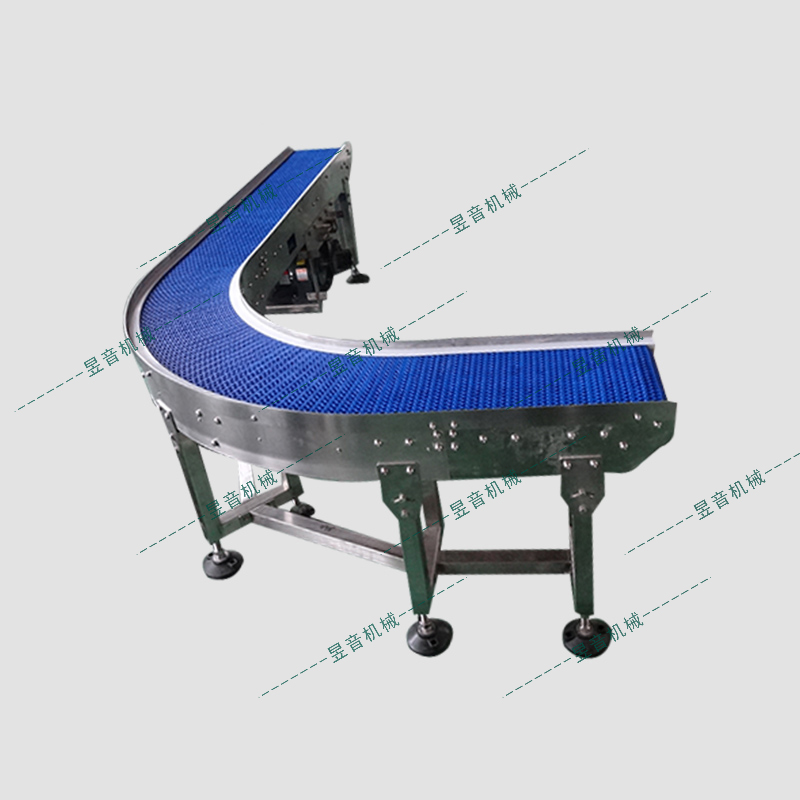
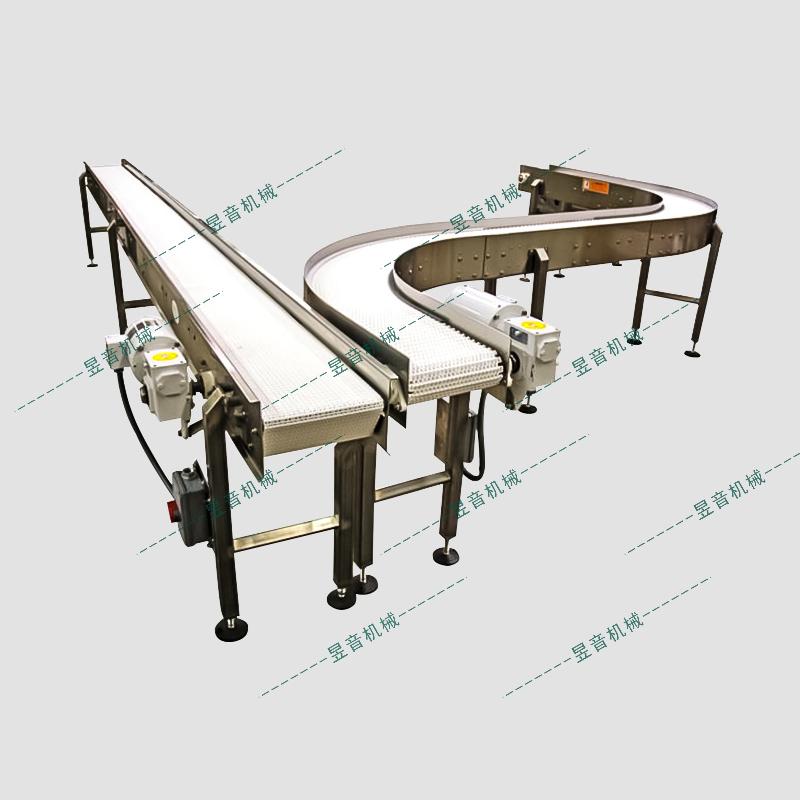
網帶輸送機是皮帶輸送機的基礎的上的升級,克服了皮帶輸送機的撕裂、刺破、腐蝕的缺點有著快捷、維護簡單的輸送方式。可以進行水平、傾斜和垂直輸送物料,也可以進行組成空間的輸送線路,輸送路一般是固定的,輸送機輸送能力大,運距長,還可以在輸送過程當中同時完成若干工藝的操作,在飲料輸送行業當中應用也十分的廣泛。
網帶輸送機的動態仿真的關健主要是在于如何對網帶輸送機的系統的動力學方程進行精確的求解。這里就牽扯到了如何選用正確的求解方法和求解軟的選擇對結果的影響也是非常重要的,在動力學模型的建立過程當中用到了大量的矩陣及微分方程,MATLAB軟件在數值求解和處理矩陣數據方面具有其他軟件不可比擬的優勢,因此本文利用MATLAB軟件處理和求解這些動力學方程。在界面開發上基于MATLAB平臺,采用 GUIDE 界面快速開發工具,編寫出平面轉彎網帶輸送機動態仿真軟解的界面。并運用該軟件對已經運行的平面轉彎網帶輸送機進行實驗仿真和分析。
如果假設膠帶的彈性模量是定值,則剛度矩陣K和阻尼矩陣C都為定值,則網帶輸送機系統狀態方程的系統矩陣A和控制矩陣B都跟時間無關,則這時的網帶輸送機系統為線性定長系統。如果假設膠帶的彈性模量與張力有關的變值時,此時矩陣A、B跟狀態變量X和時間是相關的。這時的網帶輸送機系統為非線性時變系統,實際中的系統就是時變的,但時變系統的缺點是計算量顯著增大,求解所話費的時間也隨之增長,故上海昱音技術是按照把網帶輸送機系統看做是線性定長系統來進行模擬仿真的。
平面轉彎網帶輸送機主要由輸送帶參數、線路參數、托輥和滾筒參數、驅動和拉緊、轉彎段參數、啟動仿真、制動仿真、結果查看、生成報告等幾個控件組成,每一個控件都有相對應的數據輸入對話框作為相應,點擊每個對話框可以完成對相應數據的輸入。在這里為了得出平面轉彎網帶輸送機與普通直線網帶輸送機動態仿真結果的區別,在這里將他們的相應的仿真結果列出并進行對比以得出區別,該普通直線網帶輸送機除了沒有平面轉彎段以外,其他參數均與平面轉彎網帶輸送機相同,故得出的不同仿真曲線是由于布置平面轉彎所造成的。
在啟動開始時刻網帶輸送機的速度在靠近頭部單元的對起動的反應比較靈敏,一開始啟動速度就有變化,而隨后的一些單元隨著到網帶輸送機頭部的距離的逐漸增加,其反應時間也逐漸加長,傳遞到尾部單元所用的時間在50s左右,也就是說從頭部單元到尾部單元速度的變化有個滯后的時間,這說明了應力波的傳播是漸進的。